The working principle of a DC motor is based on the law of electromagnetic interaction. According to this law, whenever a current carrying conductor or coil is placed in a magnetic field, the conductor or coil experiences an electromagnetic force.
The magnitude of this force is given by,
$$mathrm{mathit{F=BIL}}$$
Where,
-
$mathit{B}$ is the magnetic flux density,
-
$mathit{I}$ is the current flowing in the conductor or coil, and
-
$mathit{l}$ is length of the conductor.
The direction of this force can be determined by Fleming’s left-hand rule (FLHR) which we discussed in Module 1 (Basic Concepts) of this tutorial.
In order to understand the working principle of dc motor, consider a two pole DC motor as shown in Figure-1.
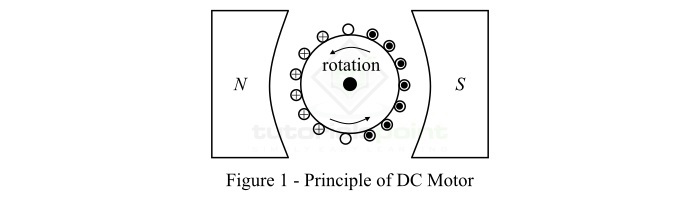
When terminals of this DC motor are connected to an external source of DC supply, the following two phenomenon happen inside the machine −
-
The field electromagnets are excited developing alternate N and S poles.
-
The armature conductors carry electric currents. Where, conductors under N-pole carry currents in one direction (say inside of the plane of the paper), while conductors under S-pole carry currents in the opposite direction (say outward of the plane of the paper).
Since, in this case, each conductor is carrying a current and is placed in a magnetic field. Due to the interaction between the current and magnetic field, a mechanical force acts on the conductor.
By applying Fleming’s left hand rule, it is clear that the mechanical force on each conductor is tending to move the conductor in the anticlockwise direction. The mechanical forces on all the conductors add together to produce a driving torque that sets the armature rotating.
When the conductor moves from one pole side to the other, the current in that conductor is reversed due to commutation action, and at the same time, it comes under the influence of the next pole of opposite polarity. As a result, the direction of the force on the conductor remains the same. In this way, the armature of a DC motor rotates continuously in one direction.
Armature Torque of DC Motor
The armature of the dc motor rotates about its axis. Thus, the mechanical force acting on the armature is known as armature torque. It is defined as the turning moment of a force acting on the armature conductors, and is given by,
$$mathrm{mathit{tau _{a}}/conductor:=:mathit{Ftimes r}}$$
Where, F is the force on each conductor and r is the average radius of the armature.
If Z is the number of conductors in the armature, then the total armature torque is given by,
$$mathrm{therefore mathit{tau _{a}}:=:mathit{ZFtimes r}:=:mathit{ZBILtimes r}}$$
Since,
$$mathrm{mathit{B}:=:frac{mathit{phi }}{mathit{a}};:mathit{I:=:frac{I_{a}}{A}};mathit{a:=:frac{mathrm{2}pi rl}{P}}}$$
Where, $phi$ is flux per pole,$mathit{I_{a}}$ is armature current,l is the effective length of each armature conductor, A is the number of parallel paths, and P is the number of poles. Then,
$$mathrm{mathit{tau _{a}}:=:frac{mathit{Zphi I_{a}}P}{mathrm{2}pi A}}$$
Since for a given dc motor, Z, P and A are fixed.
$$mathrm{therefore mathit{tau _{a}}propto mathit{phi I_{a}}}$$
Hence, the torque in a DC motor is directly proportional to flux per pole and armature current.
Learning working make money